|
SRILF Results on FRGC Database
|
||||||||||||
|
Here we provide the automatic landmarks obtained by SRILF (Shape Regression with Incomplete Local Features) on
the FRGC database. This algorithm works by calculating a set of candidate
points for each landmark and performing combinatorial search, with the key
assumption that some landmarks might be missed (i.e. no candidates detected);
this is tackled by using partial subsets of landmarks and inferring those
that are missing by maximizing their plausibility based on a statistical
shape model. Such assumption is crucial for the generalizability
of the model for live scanning scenarios, where pre-processing is not possible,
or limited to a minimum extent, and the quality of the resulting surfaces can
vary considerably. The results are split into 3 sections, according to
the following experiments:
Video Examples |
||||||||||||
|
We provide a
number of videos demonstrating the search process of SRILF. An indicative
example of the elements displayed in the videos is provided below, which are
split into 3 sections: ·
Examples on FRGC v1 with 2-fold cross-validation ·
Examples on FRGC v2 with 2-fold cross-validation ·
Examples on FRGC v2 using a model trained on FRGC v1 Each video
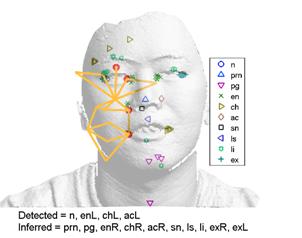
frame shows one step in the combinatorial search and contains: ·
The
candidates for each landmark being targeted, with the symbols indicated in
the legend on the left of the facial surface (the candidates are provided by
the feature detectors). ·
The
subset of candidates that is currently evaluated within the combinatorial
search, which are highlighted by thick red circles. These candidates are
assigned to landmarks, indicated at the bottom as “Detected”, and are used to
infer the remaining landmarks, indicated as “Inferred”. ·
The
shape resulting from the selected candidates plus the inference step is
indicated by means of orange lines connecting different landmarks. ·
Note
that “Detected” does not actually mean a correct localization of the
specified landmarks. It only indicates that those landmarks have been
selected based on candidates. For example, in the intermediate result
displayed below we can see what happens with an inaccurate selection of
candidates: we have an incorrect detection of the nose root combined with
candidates for the mouth, nose and inner-eye corners from the wrong side of
the face (i.e. these are clearly candidates from the right-side of the face
assigned to landmarks from the left-side). As a result, the remaining
candidates are inferred quite far away from their correct targets. This is
easily discarded by SRILF, because all remaining candidates are also very far
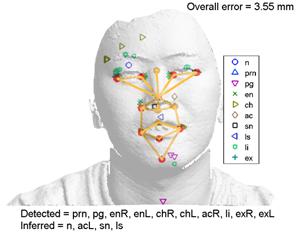
away from the inferred positions. ·
At the
final stage, when the algorithm has reached its best solution, inferred
landmarks are also indicated by thick orange circles and the overall error
(with respect to manual annotations) is displayed (top-right corner of the
figure).
Landmark abbreviations: n: nose root, prn: nose tip, pg = chin tip, en: inner-eye corners, ch = mouth corners, ac: nose corners, sn:
subnasale, ls: upper lip,
li: lower lip, ex: outer-eye corner. For landmarks
with bilateral symmetry, Left and Right are also indicated. Occlusions and rotations An interesting
by-product of the strategy followed by SRILF is that it can naturally handle
cases with occlusions or missing data. To illustrate this, we provide a
number of snapshots of automatic localization results on the Bosphorus dataset, focusing on scans that present
occlusions and out-of-plane rotations. ·
Examples on the Bosphorus database with
2-fold cross-validation |